
September 8, 2016 by Robert Pollak
Short-Text:
Autonomous vehicles, learning and reacting to traffic signs
Contact:
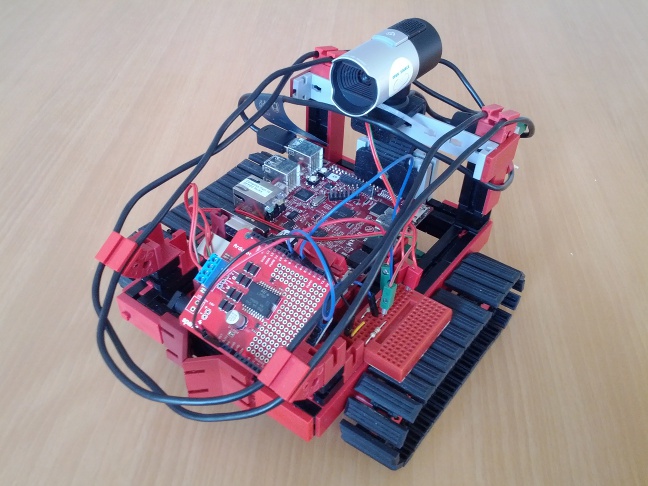
For Lange Nacht der Forschung 2012, we have built two autonomous vehicles, the FuzzleBots. One of them is a Fischertechnik caterpillar, the other a Lego truck. Via the mounted cameras and on-board machine learning algorithms, these vehicles can learn to detect hand-drawn traffic signs, differentiate between them, and react to them by moving, turning or stopping correspondingly. Computations are done on Linux-powered BeagleBoards, while Arduino Uno boards are used for motor control.
{kind=link}
{kind=link}
Current Switch:
0